SLAM From Scratch
This project implements SLAM from scratch on a turtlebot3 hamburger using wheel odometry, LIDAR, an Extended Kalman Filter (EKF), and machine learning.
Link to this project’s Github
Table of Contents
Implementation
This project consists of several ROS packages
- nuturtle_description - This package contains urdf files and basic debugging, testing, and visualization code for turtlebot3s.
- nusim - This package contains ros nodes and launchfiles that display turtlebots inside a user-defined arena with user-defined obstacles.
- nuturtle_control - This package enables control of the turtlebot via geometry_msgs/msg/Twist messages on the cmd_vel topic.
- This package contains three nodes:
- turtle_control - Manage the flow of information between all nodes. Convert twists into wheel command values, and motor encoder values into joint states.
- odometry - Perform odometry calculations for the turtlebot, and publish them for other nodes to see
- circle - Command the robot to move in a circle, and offer some additional movement related services (stopping and reversing)
- This package contains three nodes:
- nuslam - This package contains a node and a launch file that performs EKF SLAM using the turtlebot.
This project also includes its own 2D geometry library, turtlelib which provides objects for points, vectors, twists, and transformation matrices. It also includes helper functions for normalizing angles and normalizing vectors, which can be quite helpful when implementing SLAM.
A high level overview of the program’s structure can be seen below:
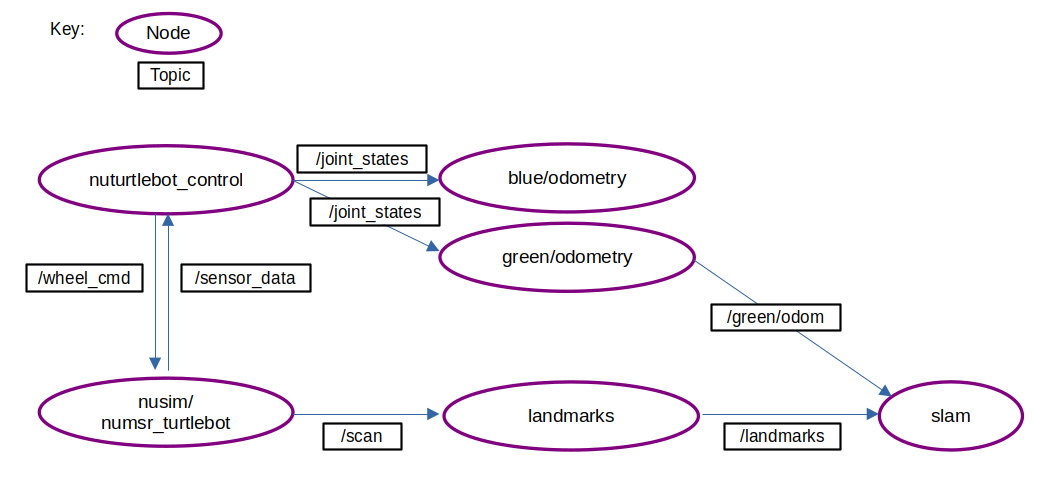
The nusim node is a placeholder for the real turtlebot. It simulates the turtlebot’s encoders and LIDAR, and controls the position of a red turtlebot in the RVIZ simulation. This robot represents the ground truth of the system.
The nuturtlebot_control node captures commands from the user and sends them to the turtlebot to tell it how to move. This node also captures encoder data from the turtlebot and transforms it into joint states of the wheels, which are absolute measurements of how far the wheels have turned since the node started running, which are then sent to the odometry node.
The odometry nodes receives these joint states from the turtlebot, and uses them to figures out the left and right wheel velocity. These wheel velocities are then used to calculate a body twist of the robot for the current timestep using forward kinematics. This body twist is then integrated to produce an updated state estimate for the robot.
The landmarks node reads LIDAR data produced by either the real turtlebot or the simulated turtlebot, and divides the data into clusters, and then performs circular regression on each of the clusters to determine which of the clusters should be counted as landmarks. This data is sent to the SLAM node.
The slam node performs EKF slam using the state estimates and body twist calculated by the odometry node. It receives measurements of possible landmarks at a rate of 5Hz, and odometry state estimates at a rate of 100Hz. In between measurements, the state estimates are accumulated and uncertainty from them is propagated through the covariance matrix. When a measurement is received, the Kalman gain is calculated and an updated state estimate is calculated. In simulation, there are two modes you can run this node in. In one mode, fake landmark data with built-in noise is generated and used to perform SLAM. In the other mode, the simulated LIDAR data is used to perform circular regression and data association.
Gallery
EKF SLAM in the real world with unknown data association and circular regression:
EKF SLAM with unknown data association and circular regression:
EKF SLAM with simulated landmark positions: