Localizing and Navigating in Semantic Maps Created by an iPhone
This project creates semantic maps from iPhone data and uses Adaptive Monte-Carlo Localization (AMCL) to localize an autonomous wheelchair within them.
This project creates semantic maps from iPhone data and uses Adaptive Monte-Carlo Localization (AMCL) to localize an autonomous wheelchair within them.

This project controls the Franka Emika Panda robot arm via teleoperation and computer vision.
This project implements SLAM from scratch on a turtlebot3 hamburger using wheel odometry, LIDAR, an Extended Kalman Filter (EKF), and machine learning.
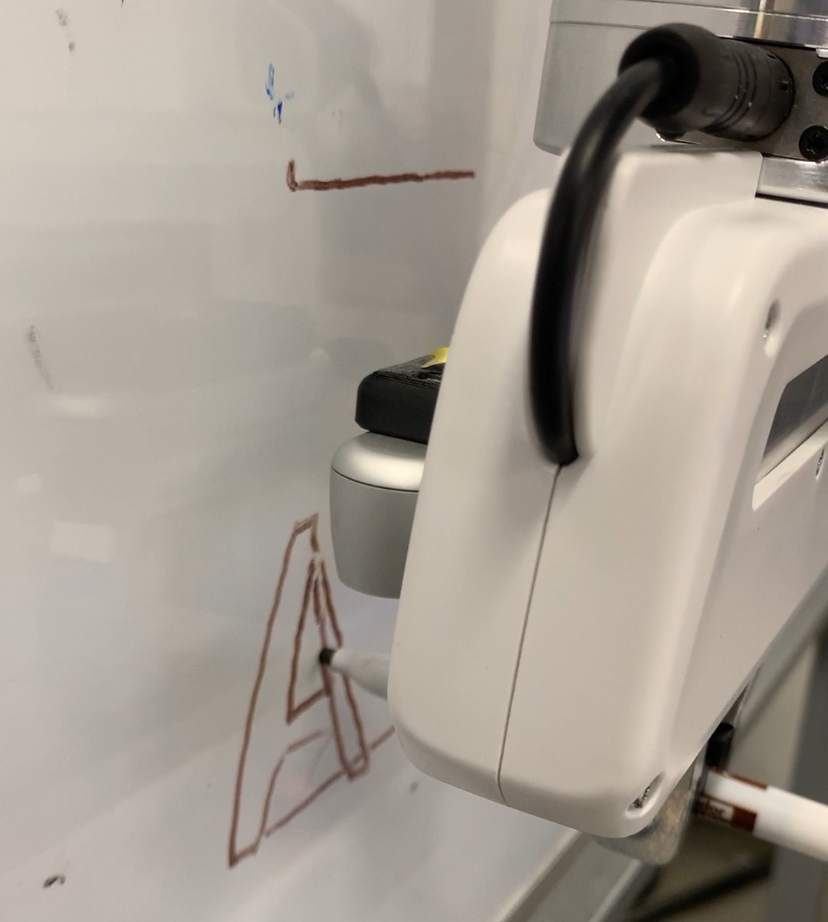
Using robot manipulation, admittance control, computer vision, and machine learning to play word games with the Franka robot arm.
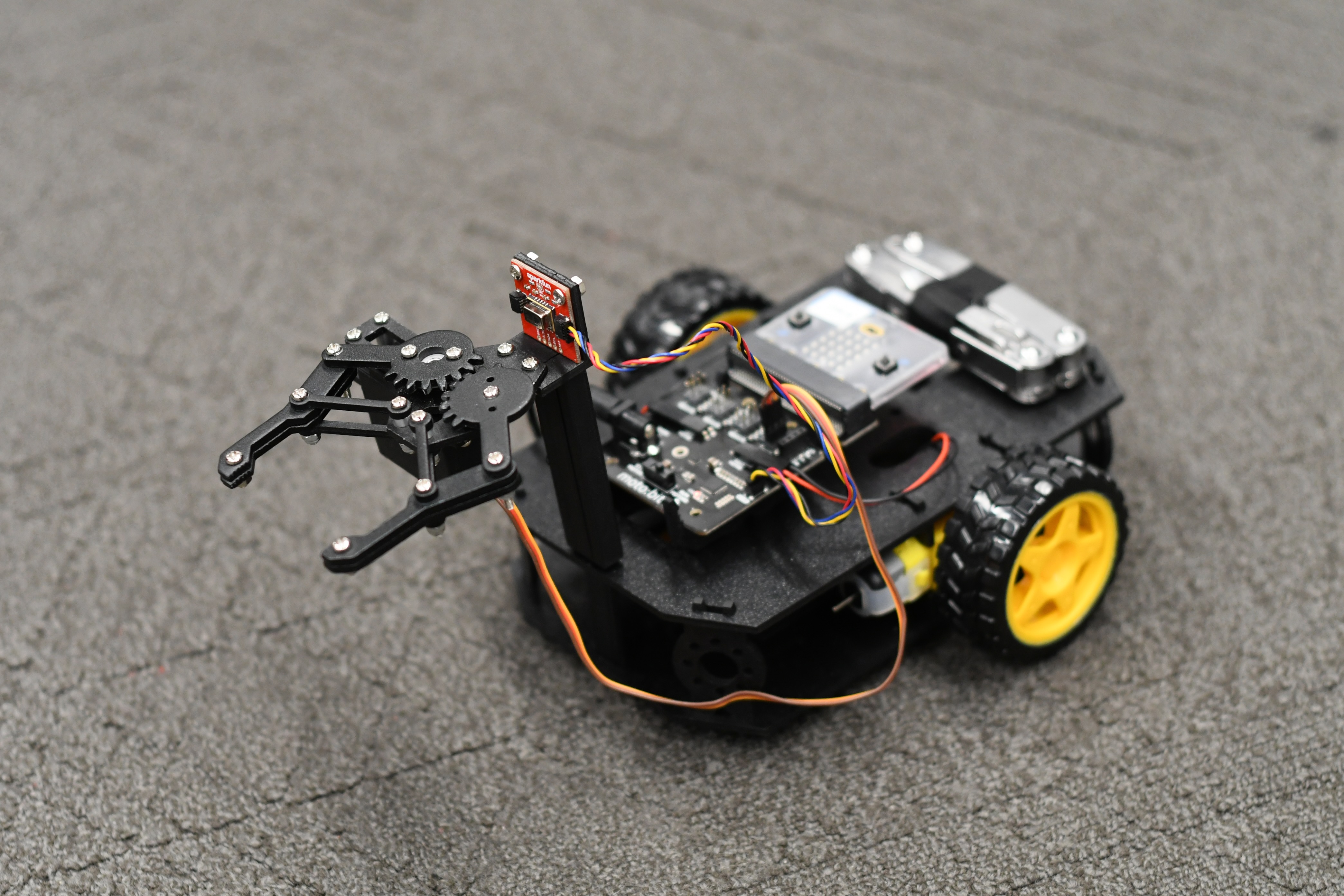
A differential drive robot with a gripper mounted to the front, for the purpose of grabbing people’s ankles. This project was highlighted in an article by McCormick Computer Science!
A python script that plans a trajectory for the end-effector of the youBot mobile manipulator.
This project implements the rapidly-expanding random tree algorithm, first developed by Steven LaValle in 1988.
Realistic simulation of a toy jack bouncing around inside a box using the Euler-Lagrange equations with fully-elastic impacts.
Using the ROS2 slam_toolbox and NAV2 packages to help a robot explore and map its environment.

Using OpenCV and the Intel RealSense D435i camera to help a PX100 robot arm grab a purple pen out of the air.